モデル予測制御,Receding horizon 制御,後退ホライズン制御・・・
など色々呼び方はあるみたいですが,これらは全部同じものみたいです。
非常に計算量が多い制御のため,いままでは発電所のボイラーなどの
サンプリング時間が長めでよい制御対象に用いられてきたようですが,
最近はコンピュータが発展してきたのでサーボ系にも用いられてきています。
どうやら最近流行りの制御のようですなー
せっかく勉強したので軽くまとめてみようかとー
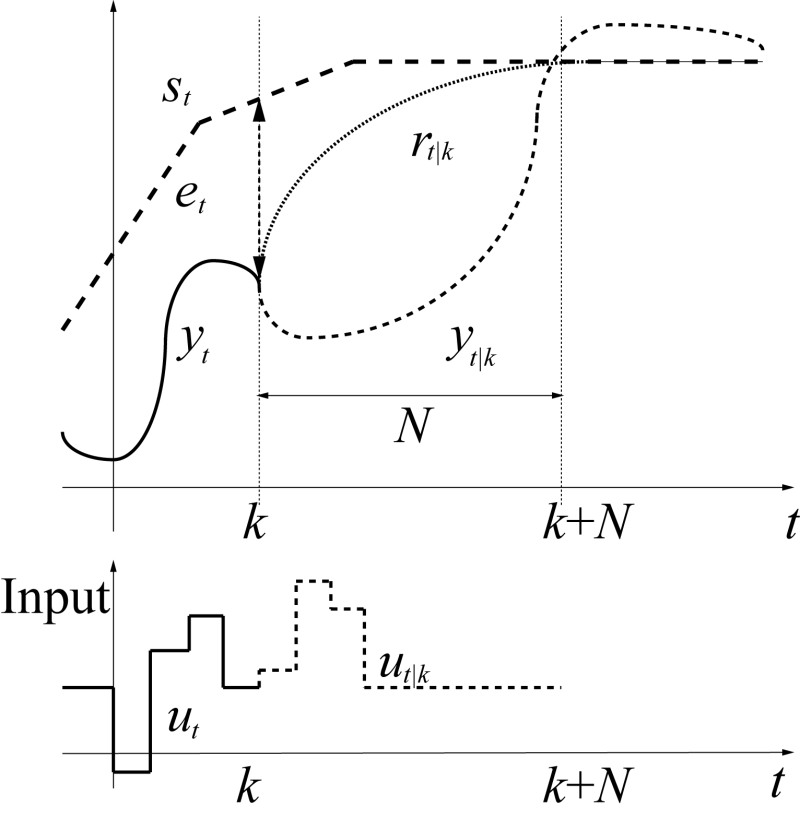
この制御の基本的なアルゴリズム。
① 時刻 k におけるシステムの出力 を得る
を得る
② 得た出力から,Nサンプリング時間先までの全ての出力 を予測する。
を予測する。
③ ②で予測した全ての出力を用いて,Nサンプリング時間先までの
理想的な出力軌道(参照値軌道 )を算出。
)を算出。
④ 参照値軌道に沿うような,Nサンプリング先までの
未来の最適入力を決定する(入力軌道 )
)
⑤ 1サンプリング先の最適入力 を入力起動から取り出し,
を入力起動から取り出し,
システムに最適入力としてフィードバックする
これらを図にするとこんな感じ。

Stというのはこれからなってほしい出力の形です。
このようにプラント(制御対象)を制御することを
後退ホライズン(Receding horizon)方策と言います。
この名前は地平線のふるまいに対応してます。人が地平線に向かって移動すると,
一定距離を保ちながら地平線は後退していきます。
その形によく似ているため,Receding horizon とか洒落た名前がついてるようです。
参考文献: Predictive Control with Constrains
など色々呼び方はあるみたいですが,これらは全部同じものみたいです。
非常に計算量が多い制御のため,いままでは発電所のボイラーなどの
サンプリング時間が長めでよい制御対象に用いられてきたようですが,
最近はコンピュータが発展してきたのでサーボ系にも用いられてきています。
どうやら最近流行りの制御のようですなー
せっかく勉強したので軽くまとめてみようかとー
この制御の基本的なアルゴリズム。
① 時刻 k におけるシステムの出力
を得る② 得た出力から,Nサンプリング時間先までの全ての出力
を予測する。③ ②で予測した全ての出力を用いて,Nサンプリング時間先までの
理想的な出力軌道(参照値軌道
)を算出。④ 参照値軌道に沿うような,Nサンプリング先までの
未来の最適入力を決定する(入力軌道
)⑤ 1サンプリング先の最適入力
を入力起動から取り出し,システムに最適入力としてフィードバックする
これらを図にするとこんな感じ。
Stというのはこれからなってほしい出力の形です。
このようにプラント(制御対象)を制御することを
後退ホライズン(Receding horizon)方策と言います。
この名前は地平線のふるまいに対応してます。人が地平線に向かって移動すると,
一定距離を保ちながら地平線は後退していきます。
その形によく似ているため,Receding horizon とか洒落た名前がついてるようです。
参考文献: Predictive Control with Constrains